WaitForSingleObject
由于进程间通信必须凭借某个已打开的对象才能发生,所以Windows调用NtWaitForSingleObject和NtWaitForMultipleObjects使线程在对象上等待,NtWaitForMultipleObjects是前者的扩展,使一个线程可以同时在多个对象上等待。线程可以同时等待多个目标,当所有对象全部满足条件时才完成的叫合取;其中任一对象满足条件就算完成的叫析取。等待发生于线程和对象之间,一个线程可以等待多个对象,而一个对象也可以被多个线程所等待。
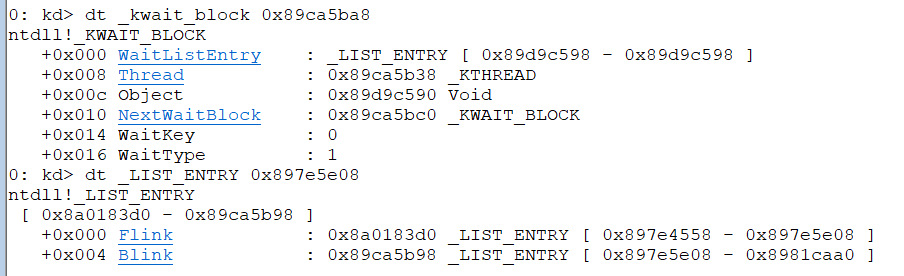
等待的关系就由_KWAIT_BLOCK结构体承载
typedef struct _KWAIT_BLOCK
{
LIST_ENTRY WaitListEntry; //挂入等待目标的等待块队列,双链队列
PKTHREAD Thread; //指向所关联的指针
PVOID Object; //等待目标的指针
PKWAIT_BLOCK NextWaitBlock; //线程的等待块队列
WORD WaitKey;
UCHAR WaitType;
UCHAR SpareByte;
} KWAIT_BLOCK, *PKWAIT_BLOCK;当进程都在睡眠等待时,会同挂KTHREAD结构体中的WaitListEntry挂入PRCB的等待队列WaitListHead,PRCB的这个队列会把所有处于等待睡眠状态的线程都串在一起。每个此对象都描述了哪个线程Thread域再等待哪个对象Object域,有几个对象就有几个wait_block,NextWaitBlock指向自己说明只有一个等待块。
0x008 WaitListHead _LIST_ENTRY 代表这个对象可以被等待,此链表包含了所有正在等待该分发器对象的线程
以下结构体均含有此结构
_KTIMER
_KEVENT
_KPROCESS
_KTHREAD
_FILE_OBJECT
_KSEMAPHORE
_KMUTANT用法
三种同步方式:事件、信号量、互斥
DWORD WaitForSingleObject(
HANDLE hHandle, //指明一个内核对象的句柄 Event/Semaphore/Mutex
DWORD dwMilliseconds //等待时间
); Event
#include <stdio.h>
#include <Windows.h>
HANDLE handle;
int data = 0;
VOID func(){
WaitForSingleObject(handle, 5000);
printf("test_%d\n", data++);
}
int main(){
handle = CreateEvent(
NULL,
TRUE,
FALSE, //FALSE先等待后执行,TRUE直接执行
"Event1"
);
CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)func, NULL, 0, NULL);
getchar();
printf("Hello World\n");
return 0;
}
Semaphore
信号量可以限制执行的线程数,通过WaitForSingleObject(semaphore, 时间)来限制等待执行时间或INFINITE无限等待
HANDLE CreateSemaphore(
LPSECURITY_ATTRIBUTES lpSemaphoreAttributes, // SD
LONG lInitialCount, // 最开始可执行的事件数
LONG lMaximumCount, // 最大可执行的事件数
LPCT STRlpName// 事件名称
);如果lInitialCount > lMaximumCount 或 lInitialCount < 0 或lMaximumCount <= 0,则此信号量无效
#include <stdio.h>
#include <Windows.h>
HANDLE semaphore;
int data = 0;
VOID func(){
WaitForSingleObject(semaphore, INFINITE);
printf("test_%d\n", data++);
}
int main(){
semaphore = CreateSemaphore(NULL, 2, 3, "Test1"); //最开始执行2个线程,最多执行3个
for(int i = 0; i < 10; i++){
CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)func, NULL, 0, NULL);
}
for(int j = 0; j < 10; j++){
Sleep(1000);
ReleaseSemaphore(semaphore, 3, NULL); //释放的信号量大于可最大可执行的事件量则释放无效
}
printf("Hello World\n");
return 0;
}Mutex
互斥体,在Windows系统中,线程可以在等待函数中指定一个此线程已经拥有的互斥体,由于Windows的防死锁机制,这种做法不会阻止此线程的运行。
HANDLE CreateMutex(
LPSECURITY_ATTRIBUTESlpMutexAttributes, // 指向安全属性的指针
BOOLbInitialOwner, // 初始化互斥对象的所有者
LPCTSTRlpName // 指向互斥对象名的指针
);#include <stdio.h>
#include <Windows.h>
HANDLE mutex;
DWORD func1(){
WaitForSingleObject(mutex, INFINITE);
printf("ThreadFun\n");
return 0;
}
int main(){
mutex = CreateMutex(
NULL,
TRUE, //TRUE等待信号,FALSE直接执行
"mutex"
);
CreateThread(NULL, 0,(LPTHREAD_START_ROUTINE)func1, NULL, 0, NULL);
Sleep(5000);
ReleaseMutex(mutex);
getchar();
printf("Hello World\n");
return 0;
}
NtWaitForSingleObject
push 2Ch
push offset stru_40EE88
call __SEH_prolog
mov eax, large fs:_KPCR.PrcbData.CurrentThread
mov al, [eax+_KTHREAD.PreviousMode]
mov [ebp+PreviousMode], al
mov esi, [ebp+Timeout]
xor ebx, ebx
cmp esi, ebx
jz short loc_496FB5
cmp al, bl //KernelMode
jz short loc_496FB5
mov [ebp+ms_exc.registration.TryLevel], ebx //从用户空间复制参数TimeOut的值
mov eax, _MmUserProbeAddress
cmp esi, eax
jnb loc_529100
mov ecx, [esi]
mov [ebp+var_3C], ecx
mov eax, [esi+4]
loc_496FA2:
mov [ebp+var_38], eax
mov [ebp+var_34], ecx
mov [ebp+var_30], eax
lea esi, [ebp+var_34]
mov [ebp+Timeout], esi
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_496FB5:
push ebx //HandleInformation
lea eax, [ebp+ObjectPointer]
push eax //Object
push dword ptr [ebp+PreviousMode]
push ebx //ObjectType
push 100000h //SYNCHRONIZE
push [ebp+ObjectHandle] //Handle
call _ObReferenceObjectByHandle@24 //根据句柄找到目标对象
mov edi, eax
cmp edi, ebx
jl short loc_497007
mov ecx, [ebp+ObjectPointer]
mov eax, [ecx-10h]
mov eax, [eax+48h] //Object->Type->DefaultObject
cmp eax, ebx //字段DefaultObject的值是指针或位移
jl short loc_496FE0 //该判断为宏定义#define IsPointerOffset(Ptr)((LONG_PTR)(Ptr)>=0)
add eax, ecx //Object指针
loc_496FE0:
mov [ebp+ms_exc.registration.TryLevel], 1
push esi //Timeout
push dword ptr [ebp+Alertable] //Alertable,表示是否允许本次等待因用户空间APC而中断
push dword ptr [ebp+PreviousMode] //WaitMode
push 6 //UserRequest
push eax //Object
call _KeWaitForSingleObject@20
mov edi, eax
mov [ebp+var_2C], edi
loc_496FFB:
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
mov ecx, [ebp+ObjectPointer] //Object
call @ObfDereferenceObject@4 //ObfDereferenceObject(x)
loc_497007:
mov eax, edi
loc_497009:
call __SEH_epilog
retn 0Ch实际的等待目标不一定是该句柄所代表的对象,实际上有些对象不可等待。可直接等待的对象的数据结构的第一个成分为DISPATCHER_HEADER结构,且该结构中的SignalState为1,而不可等待的对象则没有。
宏定义#define IsPointerOffset(Ptr)((LONG_PTR)(Ptr)>=0)中,LONG_PTR又是指针又是整数,IsPointerOffset的意思九四hi判断一个指针实际上是否为一个偏移量,如果Ptr>=0,那么最高位则为0,若小于0,则最高位为1。由于Windows中用户空间为0x0 - 0x7FFFFFFF,系统空间为0x80000000以上,所以凡是指向内核中的任意指针,最高位必为1,所以只要对象最高位为0,则目标对象本身就是可等待对象。
KeWaitForSingleObject
mov edi, edi //KeWaitForMutexObject
push ebp
mov ebp, esp
sub esp, 14h
push ebx
push esi
push edi
mov eax, large fs:_KPCR.PrcbData.CurrentThread
mov edx, [ebp+Timeout]
mov ebx, [ebp+Object]
mov esi, eax
cmp [esi+_KTHREAD.WaitNext], 0 //判断有没有等待
mov [ebp+var_Timeout], edx
lea edi, [esi+_KTHREAD.WaitBlock] //取出第一个等待块
lea eax, [esi+(_KTHREAD.WaitBlock.WaitListEntry.Flink+48h)] //取出第四个等待块,即定时器等待块 TIMER_WAIT_BLOCK
jnz InitializeWaitSingle
loc_40541F:
call ds:__imp__KeRaiseIrqlToSynchLevel@0 //KeRaiseIrqlToSynchLevel()
xor ecx, ecx
cmp [ebp+Timeout], ecx
mov [esi+_KTHREAD.WaitIrql], al //初始化等待块 InitializeWaitSingle
mov [esi+_KTHREAD.WaitBlockList], edi
mov [edi+_KWAIT_BLOCK.Object], ebx
mov [edi+_KWAIT_BLOCK.WaitKey], cx
mov [edi+_KWAIT_BLOCK.WaitType], WaitAny //只要一个有信号
mov [esi+_KTHREAD.WaitStatus], ecx
jz loc_40EAFF
lea eax, [esi+(_KTHREAD.WaitBlock.WaitListEntry.Flink+48h)] //如果结束的时间不等于0则添加定时器
mov [edi+_KTHREAD.MutantListHead.Flink], eax //Flink指链表下一项,Blink指链表前一项
mov [eax+_KTHREAD.MutantListHead.Flink], edi
mov [esi+_KTHREAD.Timer.Header.WaitListHead.Flink], eax
mov [esi+_KTHREAD.Timer.Header.WaitListHead.Blink], eax
loc_40545E:
mov al, [ebp+Alertable] //设置线程等待参数
mov dl, byte ptr [ebp+WaitReason]
mov [esi+_KTHREAD.Alertable], al
mov al, [ebp+WaitMode]
test al, al
mov [esi+_KTHREAD.WaitMode], al
mov [esi+_KTHREAD.WaitReason], dl
mov [esi+_KTHREAD.___u24.WaitListEntry.Flink], ecx //清空等待链表
jz loc_405528
cmp [esi+_KTHREAD.EnableStackSwap], 0 //判断是否开启栈交互
jz loc_405528
cmp [esi+_KTHREAD.Priority], 19h //判断优先级
mov [ebp+Object], 1
jge loc_405528
loc_40549C:
mov eax, ds:_KeTickCount.LowPart
mov [esi+_KTHREAD.WaitTime], eax //设置等待时间
mov eax, large fs:_KPCR.Prcb
lea ecx, [eax+_KPRCB.LockQueue]
call @KeAcquireQueuedSpinLockAtDpcLevel@4 //KeAcquireQueuedSpinLockAtDpcLevel(x)
mov edx, [ebp+Timeout]
loc_4054B8:
cmp [esi+_KTHREAD.ApcState.KernelApcPending], 0 //判断有没有内核APC等待执行
jnz loc_4415EA
loc_4054C2:
cmp [ebx+_DISPATCHER_HEADER.Type], MutantObject //判断是否为MutantObject对象
jnz loc_402657 //判断有没有信号,如果没有信号
mov eax, [ebx+_DISPATCHER_HEADER.SignalState]
test eax, eax //判断是否有信号
jg loc_402616 //处理互斥体
cmp esi, [ebx+_KMUTANT.OwnerThread] //判断是否为同一个线程
jz loc_402616 //信号状态的最大值
loc_4054DF:
cmp [ebp+Alertable], 0 //判断线程是否可唤醒
jnz loc_43DD24 //要唤醒的是用户还是内核
cmp [ebp+WaitMode], 0
jz short loc_4054F9 //如果时间为0,跳
cmp [esi+_KTHREAD.ApcState.UserApcPending], 0 //判断有无用户APC等待执行
jnz loc_4204DC
loc_4054F9:
test edx, edx //如果时间为0,跳
jz loc_40ABDD
mov eax, [edx+4]
or eax, [edx]
jnz loc_40ED9A
loc_40550C:
mov edi, 102h //STATUS_TIMEOUT
loc_405511:
push esi //Thread
call _KiAdjustQuantumThread@4 //KiAdjustQuantumThread(x)
loc_405517:
mov cl, [esi+_KTHREAD.WaitIrql]
call @KiUnlockDispatcherDatabase@4 //KiUnlockDispatcherDatabase(x)
mov eax, edi
loc_405521:
pop edi
pop esi
pop ebx
leave
retn 14h
//---------------------------------------------------------------------------
loc_405528:
mov [ebp+Object], ecx
jmp loc_40549CInitializeWaitSingle
xor ecx, ecx
mov [esi+_KTHREAD.WaitNext], 0
mov [esi+_KTHREAD.WaitBlockList], edi //第一个等待块
and [edi+_KWAIT_BLOCK.WaitKey], 0 //单等待,等待第一个,等待超时和唤醒
inc ecx
mov [edi+_KWAIT_BLOCK.Object], ebx //传进来的等待的对象
mov [edi+_KWAIT_BLOCK.WaitType], cx //ECX = 1 WaitAny 只有一个有信号就执行
and [esi+_KTHREAD.WaitStatus], 0
test edx, edx
jnz short loc_43EC3C //判断时间是否等于0,如果不等于0则添加定时器
mov [edi+_KWAIT_BLOCK.NextWaitBlock], edi //如果没有时间,则指向自己
loc_43EBFE:
mov al, [ebp+Alertable]
and [esi+_KTHREAD.___u24.WaitListEntry.Flink], 0
cmp [ebp+WaitMode], 0 //判断等待的模式是用户还是内核,0内核,1用户
mov [esi+_KTHREAD.Alertable], al //唤醒初始化
mov al, [ebp+WaitMode]
mov [esi+_KTHREAD.WaitMode], al
mov al, byte ptr [ebp+WaitReason]
mov [esi+_KTHREAD.WaitReason], al
jz short loc_43EC50 //把等待参数设置为0
cmp [esi+_KTHREAD.EnableStackSwap], 0
jz short loc_43EC50 //把等待参数设置为0
cmp [esi+_KTHREAD.Priority], 19h
jge short loc_43EC50 //把等待参数设置为0
mov [ebp+Object], ecx
loc_43EC2F:
mov eax, ds:_KeTickCount.LowPart
mov [esi+_KTHREAD.WaitTime], eax //设置等待时间
jmp loc_4054B8 //判断有没有内核APC等待执行
//---------------------------------------------------------------------------
loc_43EC3C:
mov [edi+_KWAIT_BLOCK.NextWaitBlock], eax //第四个等待块,时间
mov [eax+_KWAIT_BLOCK.NextWaitBlock], edi //插入链表
mov [esi+_KTHREAD.Timer.Header.WaitListHead.Flink], eax
mov [esi+_KTHREAD.Timer.Header.WaitListHead.Blink], eax
jmp short loc_43EBFE
//---------------------------------------------------------------------------
loc_43EC50:
and [ebp+Object], 0 //把等待参数设置为0
jmp short loc_43EC2Floc_402657
处理MutantObject对象
loc_402657:
cmp [ebx+_DISPATCHER_HEADER.SignalState], 0 // 判断有没有信号,如果没有信号
jle loc_4054DF // 判断线程是否可唤醒
mov al, [ebx+_DISPATCHER_HEADER.Type] // 如果有信号
mov cl, al
and cl, GateObject
cmp cl, EventSynchronizationObejct // 判断是否为事件对象
jz loc_4109B0
cmp al, SemaphereObject // 是否为信号量对象
jz loc_4135E4
loc_402679:
xor edi, edi
jmp loc_405511 // Threadloc_402616
处理互斥体
loc_402616:
cmp eax, 80000000h // 信号状态的最大值
jz loc_44AB58 // 执行APC并派发异常状态
dec [ebx+_KMUTANT.Header.SignalState] // 信号-1
jnz short loc_40264F
movzx eax, [ebx+_KMUTANT.ApcDisable]
sub [esi+_KTHREAD.KernelApcDisable], eax
cmp [ebx+_KMUTANT.Abandoned], 1 // 判断是否为废弃的互斥
mov [ebx+_KMUTANT.OwnerThread], esi
jz loc_442ABF
loc_40263D:
mov ecx, [esi+_KTHREAD.MutantListHead.Blink]
mov edx, [ecx+_LIST_ENTRY.Flink]
lea eax, [ebx+_KMUTANT.MutantListEntry]
mov [eax+_LIST_ENTRY.Flink], edx
mov [eax+_LIST_ENTRY.Blink], ecx
mov [edx+_LIST_ENTRY.Blink], eax
mov [ecx+_LIST_ENTRY.Flink], eax
loc_40264F:
mov edi, [esi+_KTHREAD.WaitStatus]
jmp loc_405511 // Threadloc_43DD24
处理可唤醒线程
loc_43DD24:
movsx eax, [ebp+WaitMode] // 要唤醒的是用户还是内核
cmp [eax+esi+_KTHREAD.Alerted], 0
jnz loc_44AB80
cmp [ebp+WaitMode], 0 // 判断是否为内核
jz short loc_43DD44 // 内核是否可唤醒
lea eax, [esi+(_KTHREAD.ApcState.ApcListHead.Flink+8)] // 判断用户APC是否为空
cmp [eax], eax
jnz loc_430975
loc_43DD44:
cmp [esi+_KTHREAD.Alerted], 0 // 内核是否可唤醒
jz loc_4054F9 // 如果时间为0,跳
jmp loc_44AB72Semaphore
临界区:是一个访问共用资源,当有线程进入临界区段时,其他线程或是进程必须等待
信号量:简单来说就是同一时间可运行的线程数或进程数,通过P、V操作进行信号量的增减
NtCreateSemaphore
创建一个信号量对象
push 1Ch
push offset stru_41D338
call __SEH_prolog
mov eax, large fs:_KPCR.PrcbData.CurrentThread
mov al, [eax+_KTHREAD.PreviousMode]
mov [ebp+PreviousMode], al
xor ebx, ebx
cmp al, bl
jz loc_4A3AA2 // 判断上一层调用是否为0环
mov [ebp+ms_exc.registration.TryLevel], ebx
mov esi, [ebp+SemaphoreHandle]
mov eax, _MmUserProbeAddress
cmp esi, eax
jnb loc_53BB06
loc_4A3A1C:
mov eax, [esi] // 测试可读可写
mov [esi], eax
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_4A3A24:
//参数检查 InitialCount > MaximumCount 或 InitialCount < 0 或 MaximumCount <= 0
cmp [ebp+MaximumCount], ebx // 判断最大的信号量是否大于0
jle loc_4A3AB1 // 小于等于0则 return STATUS_INVALID_PARAMETER 无效的参数
mov edi, [ebp+InitialCount]
cmp edi, ebx
jl short loc_4A3AB1 // return STATUS_INVALID_PARAMETER 无效的参数
cmp edi, [ebp+MaximumCount]
jg short loc_4A3AB1 // 如果初始化参数大于最大参数,return STATUS_INVALID_PARAMETER 无效的参数
lea eax, [ebp+Semaphore]
push eax
push ebx
push ebx
push 14h
push ebx
push dword ptr [ebp+PreviousMode] // BackTraceHash
push [ebp+ObjectAttributes]
push _ExSemaphoreObjectType
push dword ptr [ebp+PreviousMode] // PreviousMode
call _ObCreateObject@36 // 以类型对象ExSemaphoreObjectType为样板创建信号量对象结构
mov [ebp+var_28], eax
cmp eax, ebx
jl short loc_4A3A97 // 判断创建有没有成功
push [ebp+MaximumCount] // Limit
push edi // Count
push [ebp+Semaphore] // Semaphore
call _KeInitializeSemaphore@12 // 初始化信号结构体成员
lea eax, [ebp+Handle]
push eax // Handle
push ebx // NewObject
push ebx // ObjectPointerBias
push [ebp+DesiredAccess] // DesiredAccess
push ebx // PassedAccessState
push [ebp+Semaphore] // Object
call _ObInsertObject@24 // 插入信号量对象
mov [ebp+var_28], eax // 返回信号量句柄
cmp eax, ebx
jl short loc_4A3A97 // 判断有没有插入成功
cmp [ebp+PreviousMode], bl
jz short loc_4A3AAA
mov [ebp+ms_exc.registration.TryLevel], 1
mov eax, [ebp+Handle]
mov [esi], eax
loc_4A3A93:
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_4A3A97:
mov eax, [ebp+var_28]
loc_4A3A9A:
call __SEH_epilog
retn 14h
; ---------------------------------------------------------------------------
loc_4A3AA2:
mov esi, [ebp+SemaphoreHandle]
jmp loc_4A3A24
; ---------------------------------------------------------------------------
loc_4A3AAA:
mov eax, [ebp+Handle]
mov [esi], eax
jmp short loc_4A3A97
; ---------------------------------------------------------------------------
loc_4A3AB1:
mov eax, 0C000000Dh // STATUS_INVALID_PARAMETER 无效的参数
jmp short loc_4A3A9AKeInitializeSemaphore
初始化Semaphore对象
Semaphore = dword ptr 8
Count = dword ptr 0Ch
Limit = dword ptr 10h
mov edi, edi
push ebp
mov ebp, esp
mov eax, [ebp+Semaphore]
mov ecx, [ebp+Count]
mov [eax+_KSEMAPHORE.Header.SignalState], ecx
lea ecx, [eax+_KSEMAPHORE.Header.WaitListHead]
mov [eax+_KSEMAPHORE.Header.Type], SemaphereObject
mov [eax+_KSEMAPHORE.Header.Size], 5 //size以32位LONG为单位,所以为sizeof(KSEMAPHORE)/sizeof(ULONG) = 5
mov [ecx+_LIST_ENTRY.Blink], ecx
mov [ecx+_LIST_ENTRY.Flink], ecx
mov ecx, [ebp+Limit]
mov [eax+_KSEMAPHORE.Limit], ecx // 信号最大的上限值
pop ebp
retn 0ChNtReleaseSemaphore
释放任意个信号量,也就是V操作
push 20h
push offset stru_41AA68
call __SEH_prolog
mov eax, large fs:_KPCR.PrcbData.CurrentThread
mov al, [eax+_KTHREAD.PreviousMode]
mov [ebp+AccessMode], al
mov edi, [ebp+PreviousCount]
xor ebx, ebx
cmp edi, ebx
jz short loc_4AE91C // 等于0,不需要上次增加信号的值
cmp al, bl
jz short loc_4AE91C // 判断是否为内核模式
mov [ebp+ms_exc.registration.TryLevel], ebx
mov eax, _MmUserProbeAddress
cmp edi, eax
jnb loc_53BB9A
loc_4AE914:
mov eax, [edi] // 判断可读可写
mov [edi], eax
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_4AE91C:
// NtReleaseSemaphore(x,x,x)+26↑j
cmp [ebp+ReleaseCount], ebx
jle loc_53BBA1 // 如果添加的信号个数小于等于0,报异常,参数无效
push ebx // HandleInformation
lea eax, [ebp+Object]
push eax // 信号对象
push dword ptr [ebp+AccessMode] // AccessMode
push _ExSemaphoreObjectType // ObjectType
push 2 // DesiredAccess
push [ebp+SemaphoreHandle] // Handle
call _ObReferenceObjectByHandle@24 // 把句柄转换成信号量对象结构体
mov [ebp+var_Semaphore], eax
cmp eax, ebx
jl short loc_4AE98C // 判断有没有转换成功
mov [ebp+var_20], ebx
mov [ebp+ms_exc.registration.TryLevel], 1
push ebx // Wait
push [ebp+ReleaseCount] // Adjustment
push _ExpSemaphoreBoost // Increment
push [ebp+Object] // Semaphore
call _KeReleaseSemaphore@16 // 释放信号的具体操作
mov esi, eax
mov [ebp+var_20], esi
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_4AE969:
mov ecx, [ebp+Object] // Object
call @ObfDereferenceObject@4 // 引用计数减1
cmp [ebp+var_Semaphore], ebx
jl short loc_4AE98C
cmp edi, ebx
jz short loc_4AE98C
cmp [ebp+AccessMode], bl // 判断模式是否为0环
jz short loc_4AE997
mov [ebp+ms_exc.registration.TryLevel], 2
mov [edi], esi
loc_4AE988:
or [ebp+ms_exc.registration.TryLevel], 0FFFFFFFFh
loc_4AE98C:
mov eax, [ebp+var_Semaphore]
loc_4AE98F:
call __SEH_epilog
retn 0Ch
; ---------------------------------------------------------------------------
loc_4AE997:
mov [edi], esi
jmp short loc_4AE98CKeReleaseSemaphore
mov edi, edi
push ebp
mov ebp, esp
push ecx
push ebx
push esi
push edi // 保存环境,提升堆栈
xor ecx, ecx
call ds:__imp_@KeAcquireQueuedSpinLockRaiseToSynch@4
mov esi, [ebp+Semaphore]
mov ebx, [esi+_KSEMAPHORE.Header.SignalState] // 获取初始化信号量
mov cl, al // 保存锁的状态
mov eax, [ebp+ReleaseCount] // 取出增加的信号量个数
lea edi, [eax+ebx] // EAX = 增加的信号量
// EBX = 初始化的信号量
cmp edi, [esi+_KSEMAPHORE.Limit] // 判断当前初始化的信号量+增加的信号量个数 大于Limit
mov [ebp+var_Lock], cl
jg loc_44ACFD // 释放锁,返回异常
cmp edi, ebx // 判断信号量增加以后,有没有溢出
jl loc_44ACFD // return STATUS_INVALID_PARAMETER
loc_4120D1:
test ebx, ebx // 判断当前信号量是是否为0
mov [esi+_KSEMAPHORE.Header.SignalState], edi // 增加了
jnz short loc_4120E9
lea eax, [esi+_KSEMAPHORE.Header.WaitListHead]
cmp [eax+_LIST_ENTRY.Flink], eax // 判断等待链表是否为空
jz short loc_4120E9 // 如果为空,跳走,切换线程
mov edx, [ebp+Increment]
mov ecx, esi
call @KiWaitTest@8 // 没有信号,但是等待链表不为空
loc_4120E9:
mov cl, [ebp+Wait]
test cl, cl
jnz loc_44AD11
mov cl, [ebp+var_Lock]
call @KiUnlockDispatcherDatabase@4 // KiUnlockDispatcherDatabase(x)
loc_4120FC:
pop edi
pop esi
mov eax, ebx
pop ebx
leave
retn 10hMutant
Mutant互斥门,可以又用户空间程序通过系统调用创建和使用的称为Mutant;而Mutex则为内核自产自用,不向用户开放
突变体对象:互斥体概念的具体表现,突变体对象不仅有信号状态,如果当前为无信号状态,则一直被某个线程占有。只有所有者线程才能够释放一个突变体对象,否则引发异常
//KMUTANT结构体
typedef struct _KMUTANT {
DISPATCHER_HEADER Header;
LIST_ENTRY MutantListEntry//链表节点
struct _KTHREAD *OwnerThread//当前正拥有该突变体对象的线程
union {
UCHAR MutantFlags;
struct {
UCHAR Abandoned : 1;
UCHAR Spare1 : 7;
} DUMMYSTRUCTNAME;
} DUMMYUNIONNAME;
UCHAR ApcDisable//该突变表对象是否已被弃用
} KMUTANT, *PKMUTANT, *PRKMUTANT, KMUTEX, *PKMUTEX, *PRKMUTEX;
KeInitializeMutant
初始化一个KMUTANT对象,并指定当前线程是否为它的所有者
mov edi, edi
push ebp
mov ebp, esp
xor eax, eax
push esi
mov esi, [ebp+Mutant]
inc eax // EAX = 1
cmp [ebp+InitialOwner], al
mov [esi+_KMUTANT.Header.Type], MutantObject
mov [esi+_KMUTANT.Header.Size], 8
jz short loc_423834 // 如果为True,说明没有信号,跳走
loc_423834:
push ebx
push edi
mov eax, large fs:_KPCR.PrcbData.CurrentThread
and [esi+_KMUTANT.Header.SignalState], 0
mov edi, eax
xor ecx, ecx
mov [esi+_KMUTANT.OwnerThread], edi // 把当前线程放入互斥体中
call ds:__imp_@KeAcquireQueuedSpinLockRaiseToSynch@4
mov edi, [edi+_KTHREAD.MutantListHead.Blink]
mov ebx, [edi+_LIST_ENTRY.Flink]
lea edx, [esi+_KMUTANT.MutantListEntry]
mov [edx+_LIST_ENTRY.Flink], ebx
mov [edx+_LIST_ENTRY.Blink], edi
mov [ebx+_LIST_ENTRY.Blink], edx
mov cl, al
mov [edi+_LIST_ENTRY.Flink], edx
call @KiUnlockDispatcherDatabase@4 // 无论有无信号均切换线程,防止死锁
pop edi
pop ebx
jmp loc_4237DB
and [esi+_KMUTANT.OwnerThread], 0 // 把互斥体里面的线程清0
mov [esi+_KMUTANT.Header.SignalState], eax // 如果为False,默认有信号
loc_4237DB: // CODE XREF: KeInitializeMutant(x,x)+AC↓j
lea eax, [esi+_KMUTANT.Header.WaitListHead]
mov [eax+_LIST_ENTRY.Blink], eax // 初始化等待链表
mov [eax+_LIST_ENTRY.Flink], eax
mov [esi+_KMUTANT.Abandoned], FALSE // 设置互斥体对象没有被废弃
mov [esi+_KMUTANT.ApcDisable], 0 // 内核APC是否已开启
pop esi
pop ebp
retn 8KeReleaseMutant
KeInitializeMutant反向操作(V),并防止死锁
mov edi, edi
push ebp
mov ebp, esp
push ebx
push esi
push edi
xor ecx, ecx
call ds:__imp_@KeAcquireQueuedSpinLockRaiseToSynch@4
mov esi, [ebp+Mutant]
mov bl, al
mov eax, [esi+_KMUTANT.Header.SignalState]
mov [ebp+Mutant], eax
mov eax, large fs:_KPCR.PrcbData.CurrentThread
cmp [ebp+Abandoned], 0
mov edi, eax
jnz loc_423808 // Abandon = TRUE, 强迫释放对象
cmp [esi+_KMUTANT.OwnerThread], edi // 是否为当前线程中的互斥体
jnz loc_4425C8
loc_402B7A: // CODE XREF: .text:004425E6↓j
inc [esi+_KMUTANT.Header.SignalState] // 给信号+1
loc_402B7D:
cmp [esi+_KMUTANT.Header.SignalState], 1
jnz short loc_402BB3 // 判断信号是否为1
cmp [ebp+Mutant], 0
jg short loc_402BA4 // 判断原来的信号是否大于0
mov eax, [esi+_KMUTANT.MutantListEntry.Flink] // 移除链表第一个元素
mov ecx, [esi+_KMUTANT.MutantListEntry.Blink]
mov [ecx+_LIST_ENTRY.Flink], eax
mov [eax+_LIST_ENTRY.Blink], ecx
movzx eax, [esi+_KMUTANT.ApcDisable]
add [edi+_KTHREAD.KernelApcDisable], eax
jz loc_40E9F9 // 如果ApcDisable和KernelApcDisable为空,但是链表不为空,把内核APC置1
loc_402BA4:
and [esi+_KMUTANT.OwnerThread], 0 // 把互斥体的线程清0
lea eax, [esi+_KMUTANT.Header.WaitListHead]
cmp [eax+_LIST_ENTRY.Flink], eax // 比较互斥体链表是否为空
jnz loc_422997 // 不为空则调用KiWaitTest
loc_402BB3:
mov al, [ebp+Wait]
test al, al
jnz loc_44AC38
mov cl, bl
call @KiUnlockDispatcherDatabase@4 // 调用线程,防止死锁
loc_402BC5:
mov eax, [ebp+Mutant]
pop edi
pop esi
pop ebx
pop ebp
retn 10hKeSetEvent
typedef enum _EVENT_TYPE{
NotificationEvent, // 代表通知,是广播式的,通知公众某个事件已发生(Header中的SignalState为1)
SynchronizationEvent // 用于同步,相当于初值为0,最大值为1的信号量,只有先释放才能继续执行
} EVENT_TYPE;KeSetEvent相当于V操作,把事件对象的SignalState设置为1
mov edi, edi
push ebp
mov ebp, esp
push ebx
push esi
push edi
xor ecx, ecx
call ds:__imp_@KeAcquireQueuedSpinLockRaiseToSynch@4 // KeAcquireQueuedSpinLockRaiseToSynch(x)
mov ecx, [ebp+Event]
mov edi, [ecx+_KEVENT.Header.SignalState]
mov bl, al
lea eax, [ecx+_KEVENT.Header.WaitListHead] // 有无信号
mov esi, [eax+_LIST_ENTRY.Flink]
cmp esi, eax // 判断等待链表是否为空
jnz short loc_40B0BC
mov [ecx+_KEVENT.Header.SignalState], 1 // 如果为空,设置信号状态为1
loc_40B0A1:
mov cl, [ebp+Wait]
test cl, cl
jnz loc_445468
loc_445468:
mov eax, large fs:_KPCR.PrcbData.CurrentThread
mov [eax+_KTHREAD.WaitNext], cl
mov [eax+_KTHREAD.WaitIrql], bl
jmp loc_40B0B3
mov cl, bl
call @KiUnlockDispatcherDatabase@4 // 线程切换
loc_40B0B3:
mov eax, edi
pop edi
pop esi
pop ebx
pop ebp
retn 0Ch
// ---------------------------------------------------------------------------
loc_40B0BC:
xor eax, eax
inc eax // EAX = 1
cmp [ecx+_KEVENT.Header.Type], EventNotificationObject // 判断是否为事件通知类型
jnz loc_40EDE1 // 处理事件同步
loc_40EDE1:
cmp [esi+_KWAIT_BLOCK.WaitType], ax // AX = 1 判断是不是任意等待信号
jnz loc_40B0C8 // 本身有信号则跳走
movzx edx, [esi+_KWAIT_BLOCK.WaitKey]
mov ecx, [esi+_KWAIT_BLOCK.Thread]
push 0
push [ebp+Increment]
call @KiUnwaitThread@16 // 把线程从等待块中摘掉,设置线程为就绪状态
jmp loc_40B0A1
loc_40B0C8:
test edi, edi // 本身有信号则跳走
jnz short loc_40B0A1 // 不等于0说明有信号,跳转到执行代码
mov edx, [ebp+Increment]
mov [ecx+_KEVENT.Header.SignalState], eax
call @KiWaitTest@8 // KiWaitTest(x,x)
jmp short loc_40B0A1KiAcquireSpinLock
自旋锁就是在有一个线程已经进入临界区的时候,多核情况下的别的线程是一直在循环判断进入临界区的条件。没有线程切换,消耗更加的小,但要注意不要出现死锁。 并发访问不高的情况下可以使用自旋锁,如果是多个线程同时访问,会造成CPU的性能的浪费。
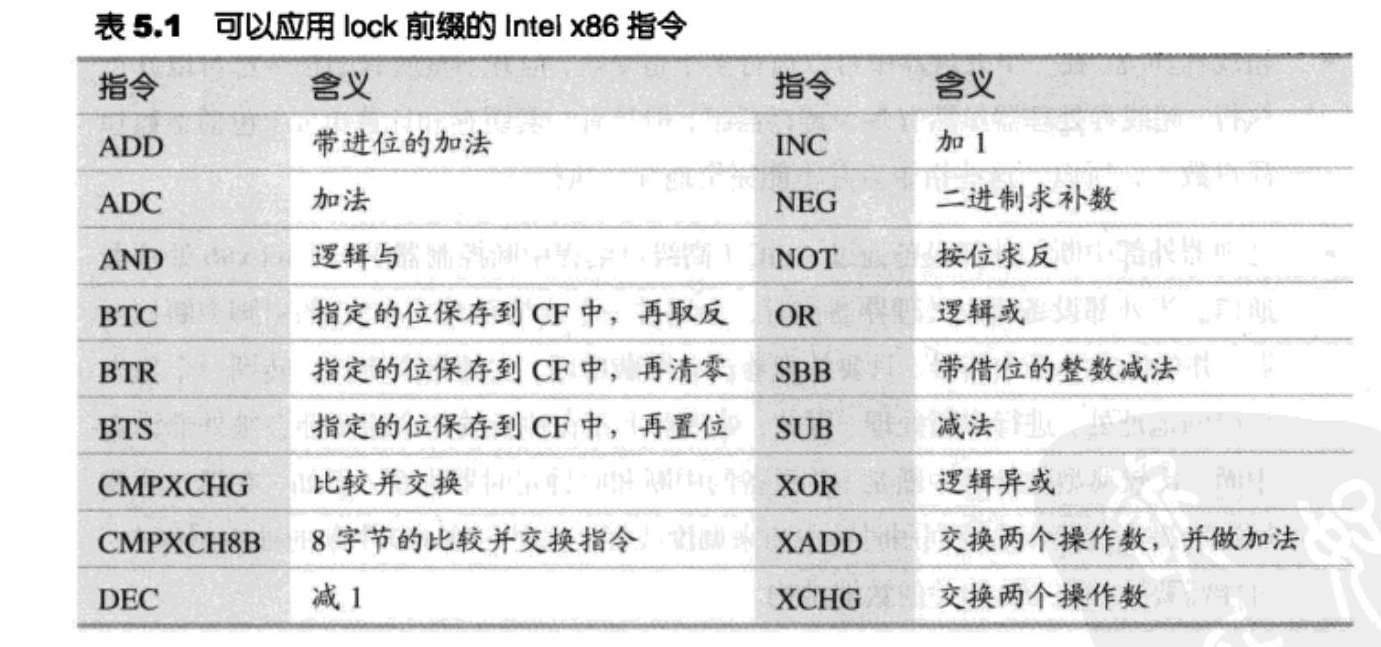
lock bts dword ptr [ecx], 0 ; 把数据存到CF里面,置1
jb short loc_40B450 ; 判断CF是否为1
retn
; ---------------------------------------------------------------------------
loc_40B450:
test dword ptr [ecx], 1 ; 判断有没有设置成功
jz short @KiAcquireSpinLock@4
pause
jmp short loc_40B450 ; 判断有没有设置成功Windbg获取进程的_kthread
!process 0 0 找到一个PROCESS ID,这里选择vmtoolsd.exe,因为可以看到较多的线程
dt _kprocess [PROCESS]列出_KPROCESS结构体,找到+50的ThreadListHead
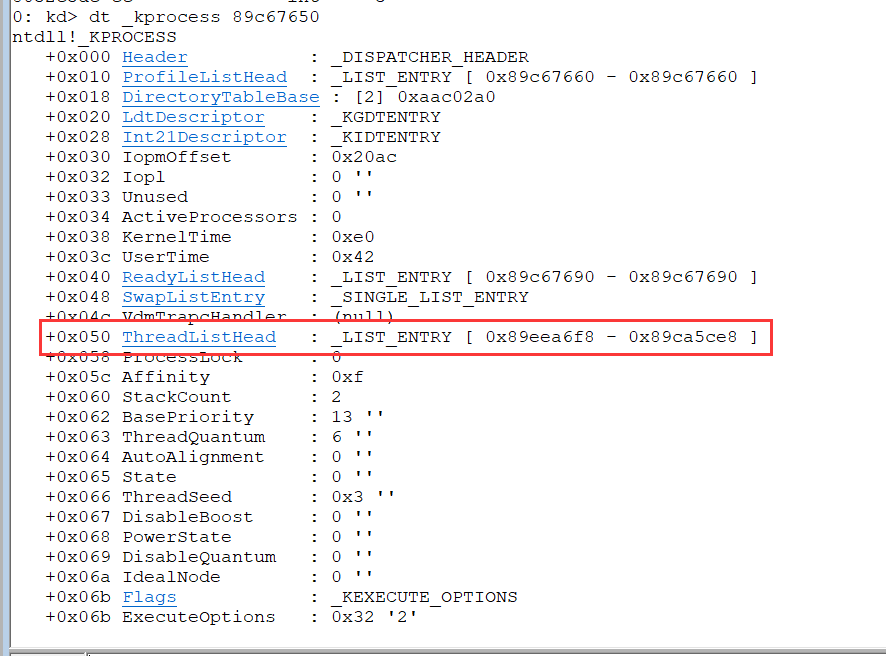
ThreadListHead的本质就是_LIST_ENTRY双向链表,多列几个可以发现Flink就是下一项,Blink是上一项,而第一项的上一项则是ThreadListHead地址,最后一项的下一项也是ThreadListHead的地址,即_kprocess+0x50
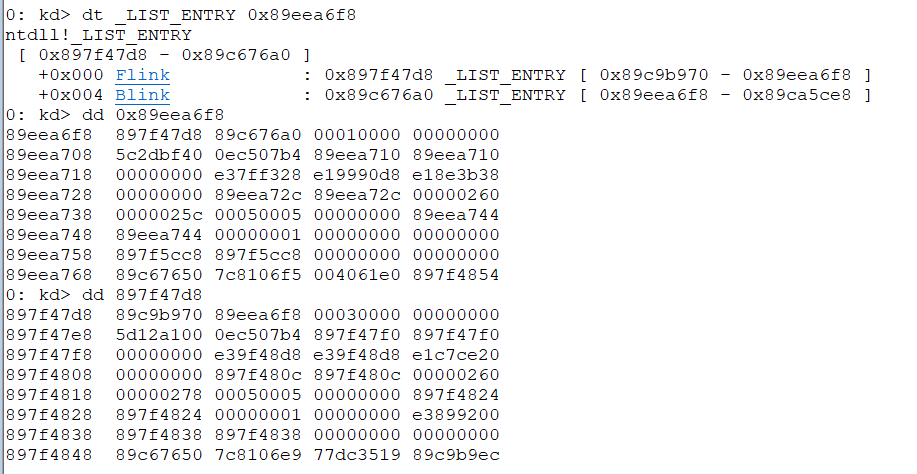
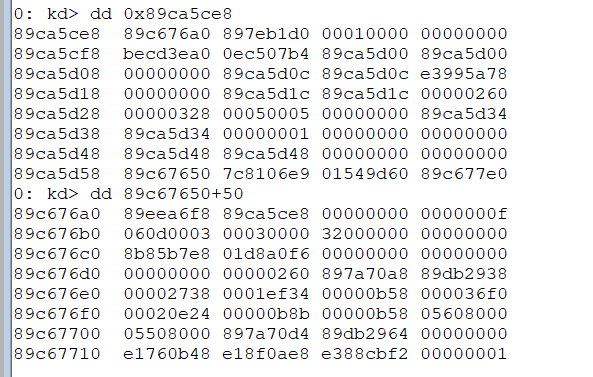
由_kthread结构体可以得知,在0x1b0处同样有一个ThreadListEntry,而此ThreadListEntry便是上面得出的地址,由此可以计算出_kthread的地址为[_LIST_ENTRY] - 0x1b0
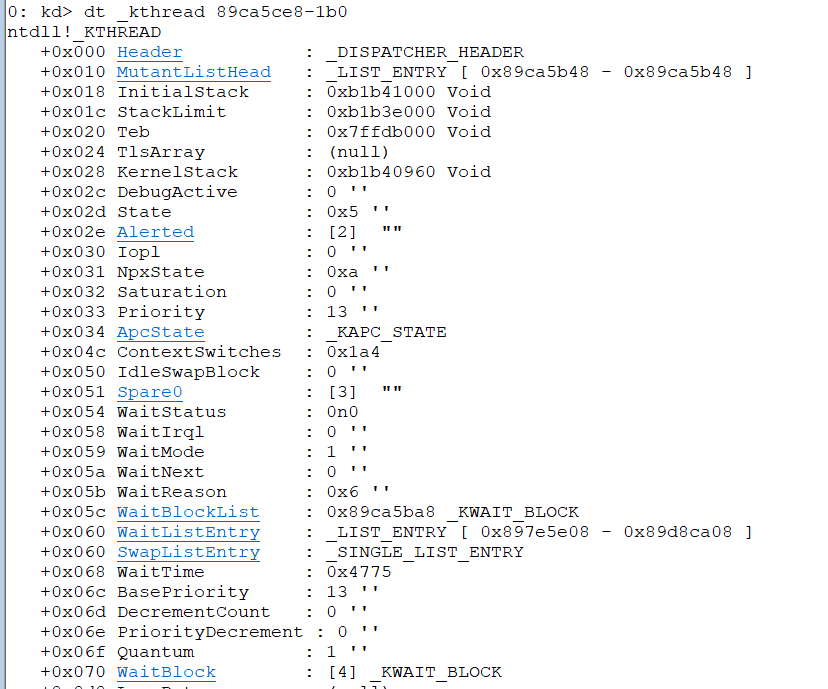
同样也可查看以下WaitBlockList和WaitListEntry